Vincent Lui
I am currently a research manager at 4DMedical, working on computer vision and image processing for medical imaging modalities such as X-ray fluoroscopies and CT scans. I completed my PhD in computer vision at Monash University in 2016, where I was advised by Professor Tom Drummond.
History
2020-: Research Lead, 4DMedical
2018-20: CV Engineer, Sentient Vision Systems.
2016-18: Post-doc, Australian Centre for Robotic Vision (ACRV)
2012-16: PhD, Computer Vision & Robotics, Monash University.
2008-11: Bachelors of Mechatronics Engineering, Monash University.
Research
Efficient Subpixel Refinement with Symbolic Linear Predictors
Vincent Lui, Jonathon Geeves, Winston Yii, Tom Drummond
Computer Vision and Pattern Recognition (CVPR), 2018.
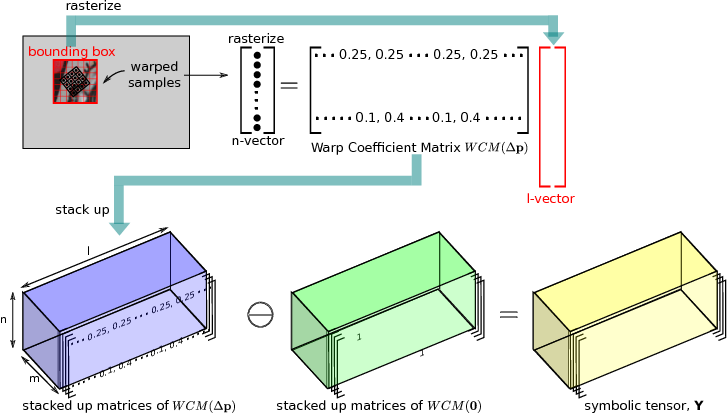
This paper presents an efficient learning-based approach for performing subpixel refinement without compromising accuracy.
MO-SLAM: Multi-Object SLAM with Run Time Duplicate Object Discovery
Thanuja Dharmasiri, Vincent Lui, Tom Drummond
IEEE/RSJ International Conference on Intelligent Robotics and Systems (IROS), 2016.
Fast Inverse Compositional Image Alignment with Missing Data and Re-weighting
Vincent Lui, Dinesh Gamage, Tom Drummond
British Machine Vision Conference (BMVC), 2015.
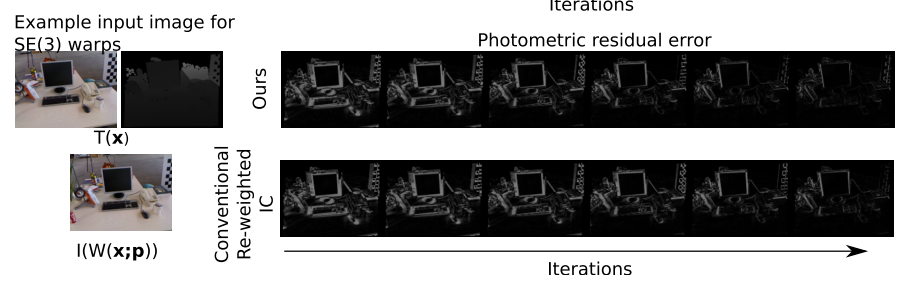
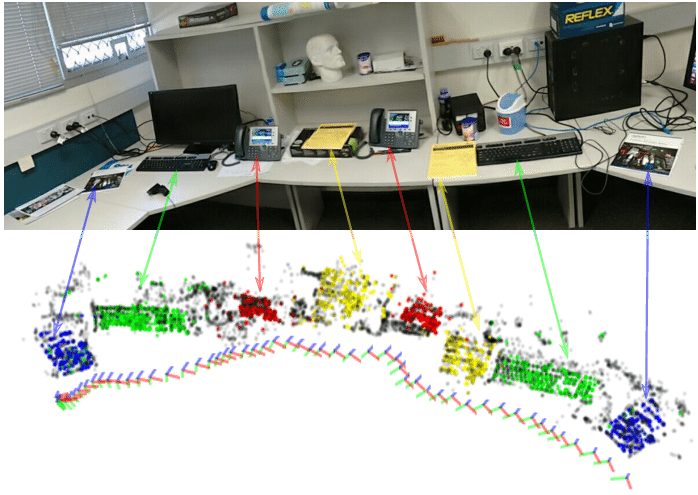
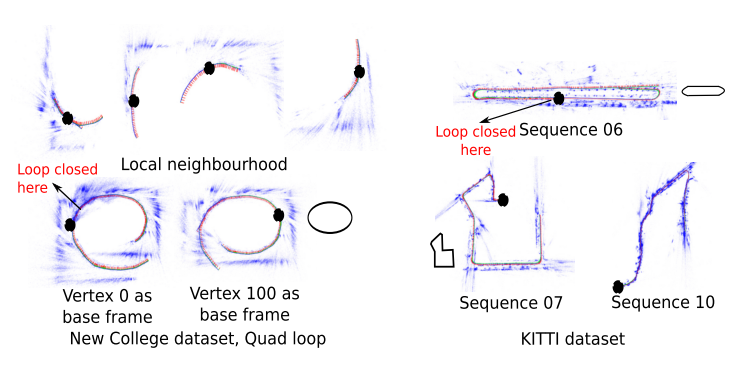
Image Based Optimization without Global Consistency for Constant Time Monocular Visual SLAM
Vincent Lui, Tom Drummond
International Conference on Robotics and Automation (ICRA), 2015.
An Iterative 5-Point Algorithm for Fast and Robust Essential Matrix Estimation
Vincent Lui, Tom Drummond
British Machine Vision Conference (BMVC), 2013.
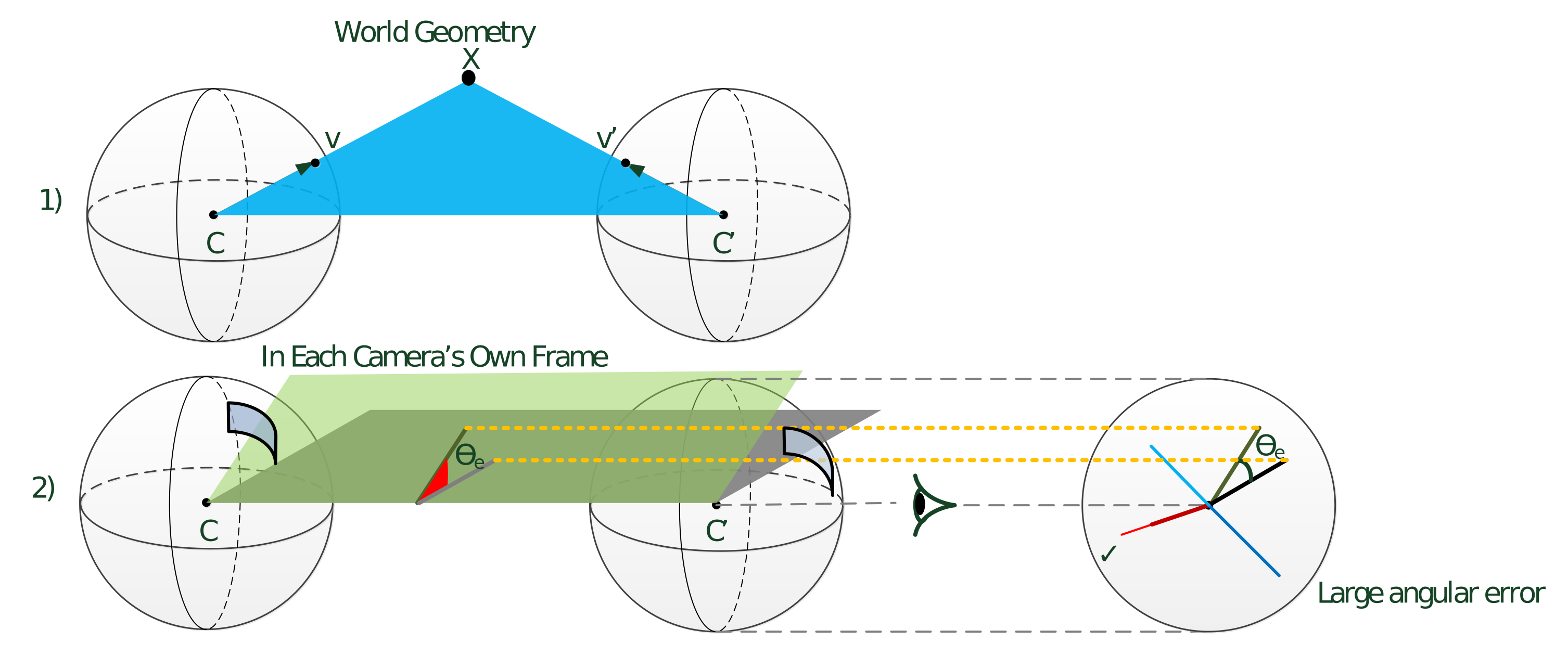
This paper presents a novel algorithm for calculating epipolar geometry from 5 correspondences. The algorithm directly solves for the orientation of each camera relative to the baseline that separates them and is able to impose the half plane constraints that arise from the requirement that visible landmarks must be in front of both cameras.